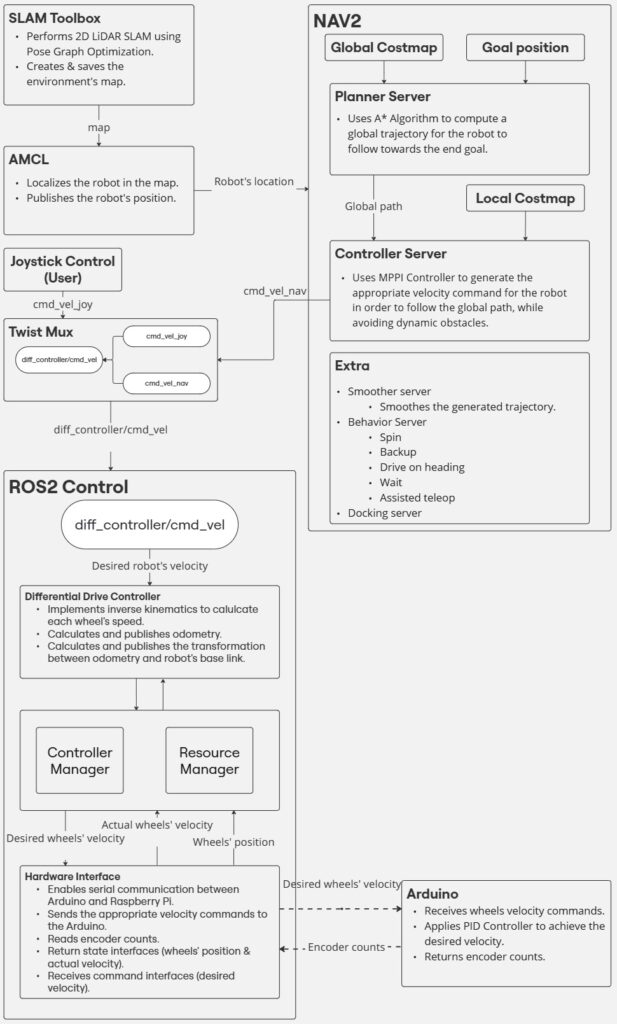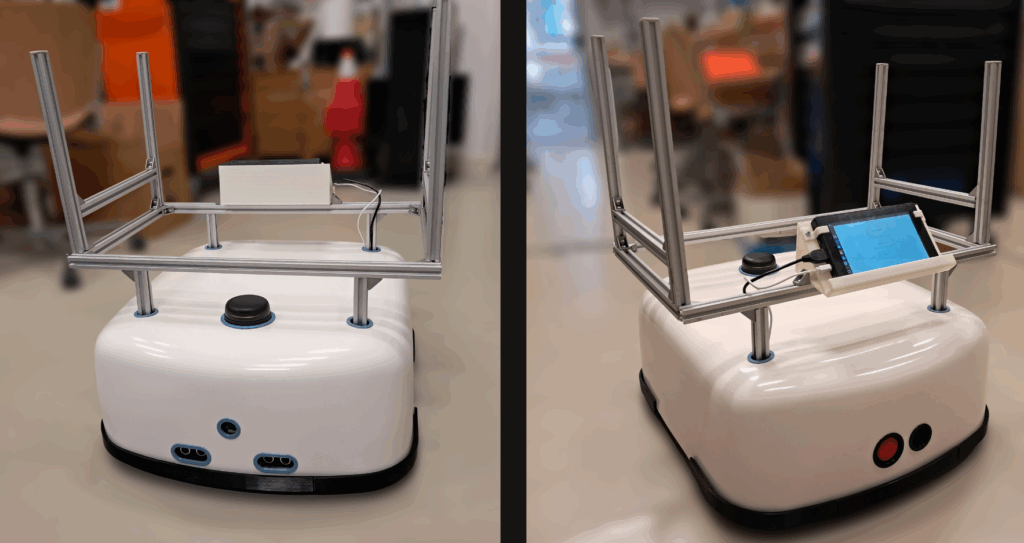
For my final year thesis, I developed an autonomous wheeled robot for payload transportation using ROS2. Simultaneous Localization and Mapping (SLAM) and Autonomous Navigation algorithms (NAV2 Framework) were implemented in both a simulation (Gazebo) environment and on the real hardware. Moreover, the Arduino code for controlling the robot’s motors using velocity commands and a PID controller was developed. The robot’s hardware includes an Arduino Mega, a Raspberry Pi 5, DC Motors with encoders and a LiDAR sensor.
Key Features:
- ROS2 Control Package
- SLAM: Slam Toolbox Package
- Localization: Adaptive Monte Carlo Localization (AMCL)
- Autonomous Navigation: NAV2 Framework
Github repository: https://github.com/ApostolosApostolou/Final-Year-Thesis-UCY