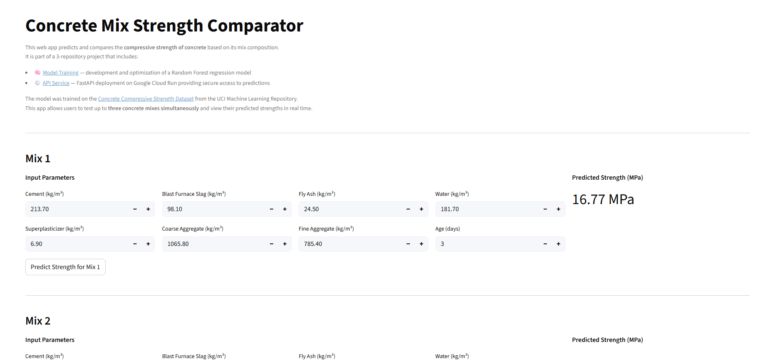
For this project, I developed a complete end-to-end application that predicts the compressive strength of concrete based on its mix composition. The workflow included data analysis, model training, and hyperparameter tuning using Python and Scikit-Learn, where multiple regression algorithms were compared. The final model, a Random Forest Regressor, was deployed as a FastAPI web service within a Docker container on Google Cloud Run. A custom Streamlit web interface was also built, allowing users to input mix parameters and view real-time predictions through a secure API connection.