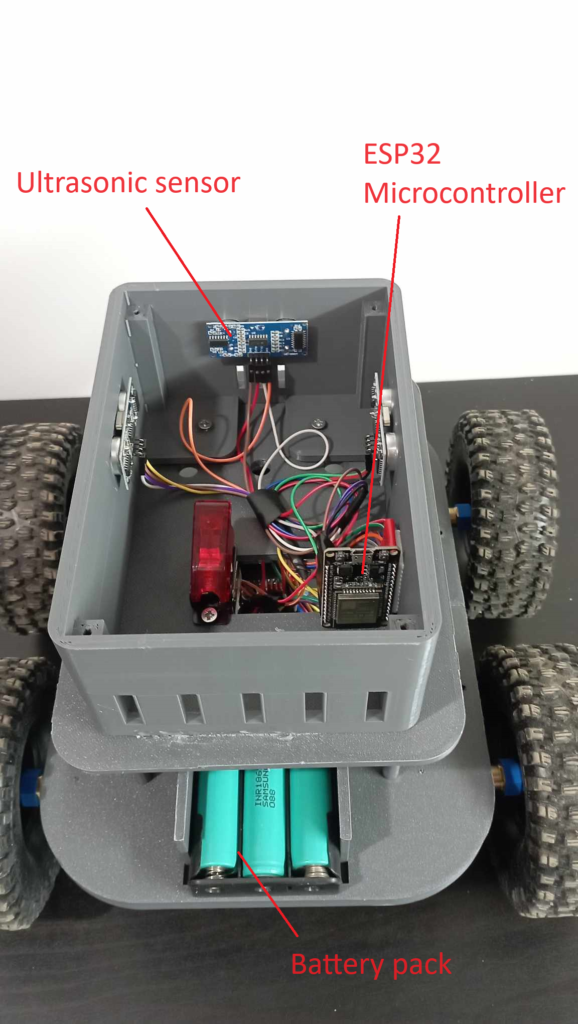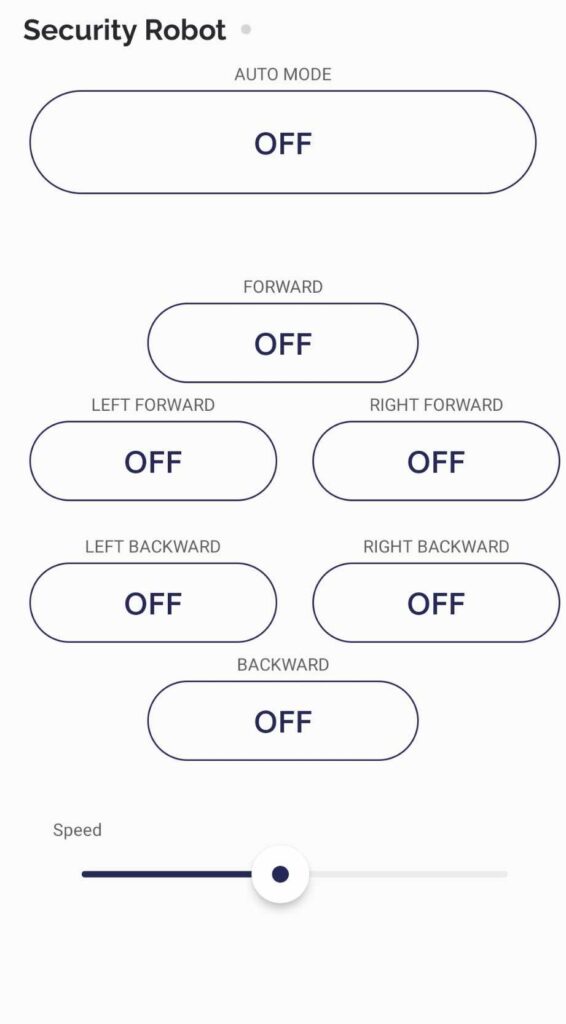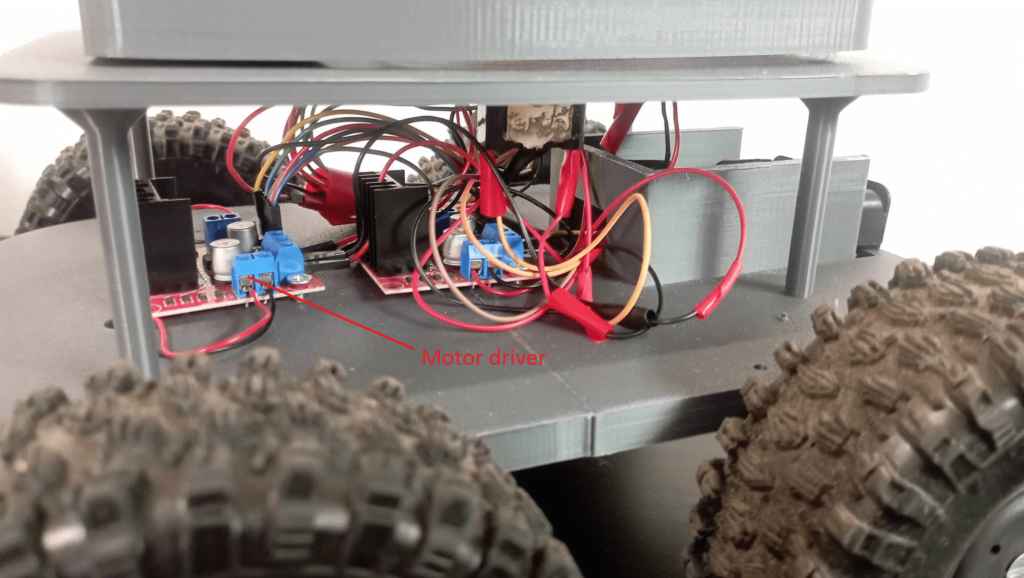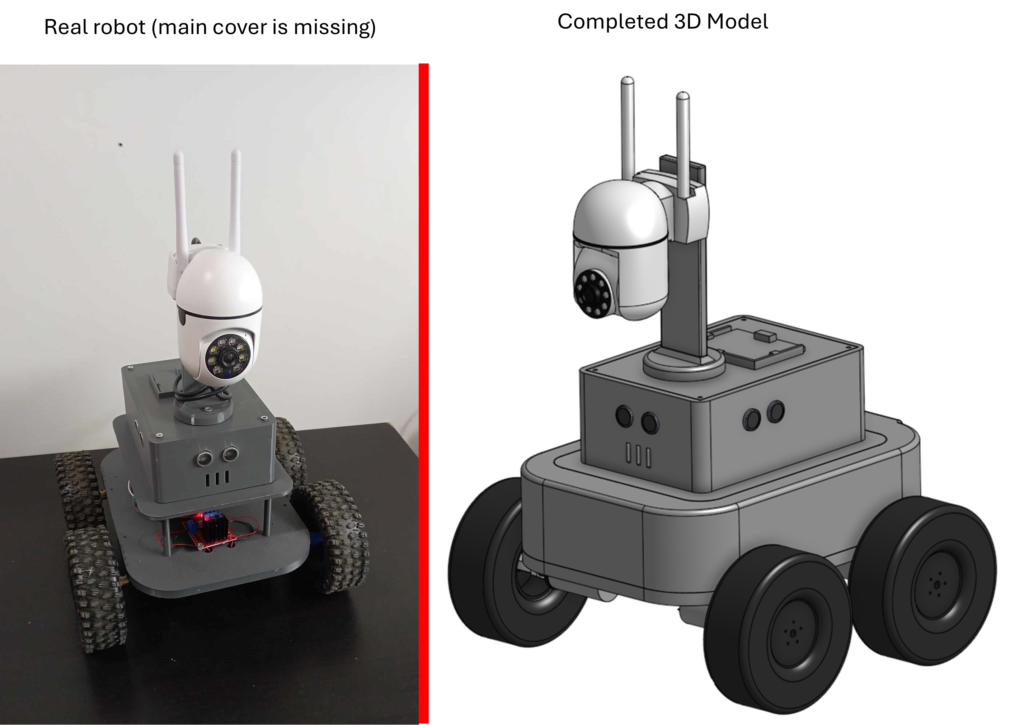
This prototype is a security robot designed for indoor and outdoor inspections, equipped with four electric motors and capable of both autonomous operation and manual control via a smartphone or computer using a dedicated controller. Its autonomy is enabled by three ultrasonic sensors and a rule-based algorithm. A 1080P camera allows real-time video streaming, enhancing surveillance capabilities, while a custom Python program with OpenCV enables people detection, saving frames upon detection for later analysis. The ESP32 microcontroller, programmed using Arduino IDE, manages the control algorithm. The robot’s chassis and body parts are designed in Onshape and 3D printed with PLA. Future improvements include a larger chassis, a better camera, and enhanced self-navigation features.