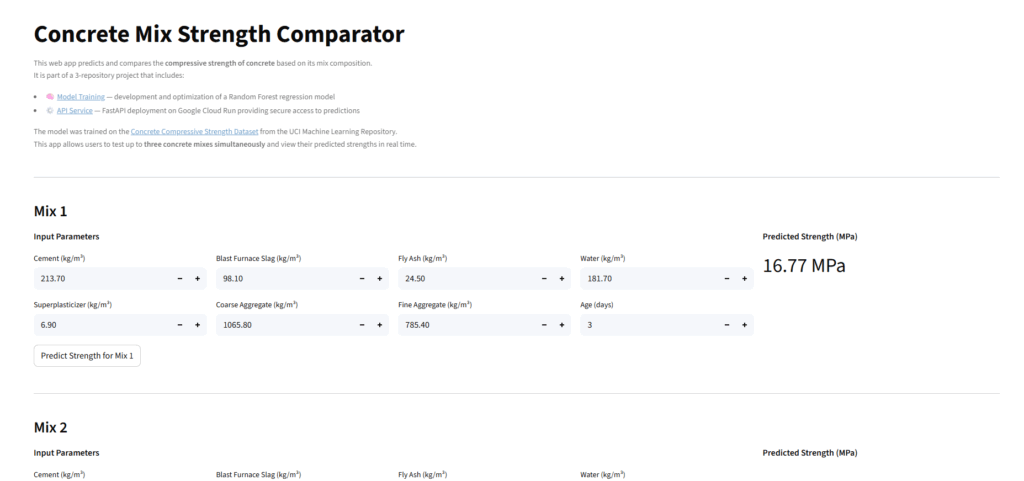
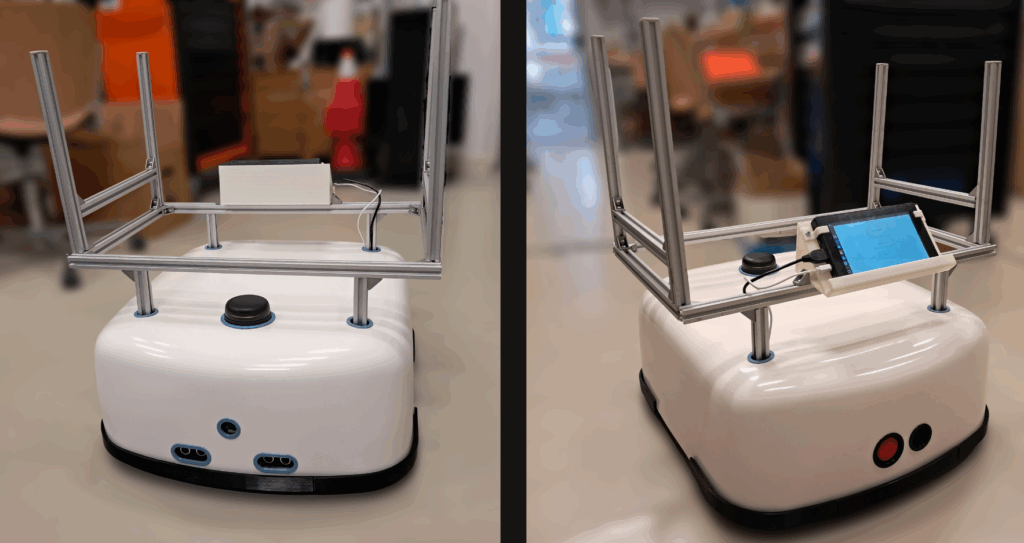
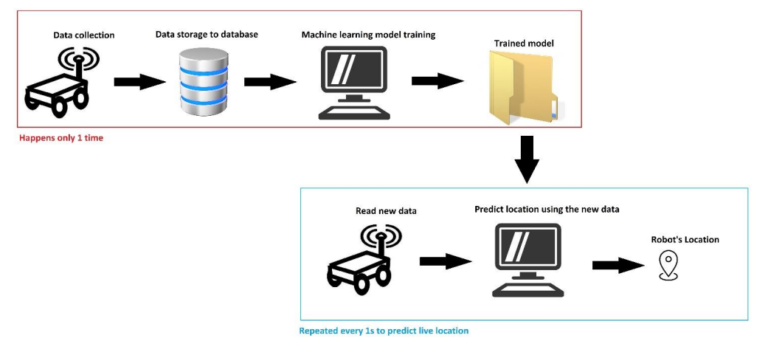
About me Linkedin Github Youtube Focus AreasRobotics · Machine Learning · Computer Vision · Control SystemsBackgroundMSc Autonomous Systems — Technical University of Denmark (DTU)BSc Mechanical Engineering — University of Cyprus Skills & Tools Software & Systems Python, C++, MATLABML/CV (PyTorch, OpenCV, YOLO)ROS2Git, Docker, FastAPI, Cloud Hardware & Electronics CAD (SolidWorks, Onshape)3D PrintingSensors & PCB Design Selected Projects Stereo 3D Tracker Concrete Strength Prediction Autonomous Mobile Robot Custom Data Acquisition Module Indoor robot positioning system based on Wi-Fi signals: An implementation using machine learning ICARUS Flight Controller